4.3.5.1. SA3X3Y(中型6轴一体型驱动装置)
4.3.5.1. SA3X3Y(中型6轴一体型驱动装置)
驱动装置(Drive Unit)是根据伺服板发出的电流指令、执行向马达各相输送电流的功率放大功能。6轴一体型驱动装置(Drive Unit)可以同时驱动6个马达、其构成如下。
表 4‑34 SA3X3Y(中型6轴一体型驱动装置)的构成
构成元件 | 功能 | |
BD552(逻辑电路板) | 把从伺服板接收的PWM信号分离为IPM上端/下端驱动信号、进行错误处理 | |
BD551 (强电板) | 门驱动模块 | 生成IPM门信号 |
门电源模块 | 生成门电源 | |
电流检测部分 | 检测出马达上流过的电流 | |
DB控制 | 根据伺服板的信号进行Dynamic Brake控制 | |
其它零件 | 散热板 | 把从IPM产生的热量散发到外部 |
IPM | 交换设备 | |
n 伺服驱动装置型号编号构成
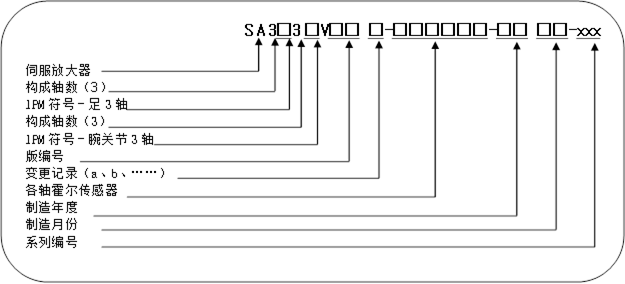
表 4‑35 伺服驱动器系列的形式符号
分类 | 形式符号 |
伺服放大器(Servo AMP) | SA |
表 4‑36 伺服驱动器系列的形式符号
构成 | 分类 | 应用 | ||
IPM容量 | 1L | 4X | HC2500BD-10 | 6轴一体型 |
3X | 3Y | 应用HS165 | ||
3X | 3Z | HC2500BD-00、 HC2500IK | ||
年度 | 00 ~ 99 | 生产年度: 2000年~2099年 | ||
月份 | 01 ~ 12 | 生产月份: 1月~12月 | ||
系列编号 | 001 ~ 999 | 每月生产台数: 1台~999台 | ||
表4‑37 IPM容量
大型/中型 | L | (IPM额定电流)150A、(霍尔传感器额定电流)4V/75A |
X | (IPM额定电流)100A、(霍尔传感器额定电流)4V/50A | |
Y | (IPM额定电流)75A、(霍尔传感器额定电流)4V/50A | |
Z | (IPM额定电流)50A、(霍尔传感器额定电流)4V/25A |
表4‑38 霍尔传感器(Hall Sensor)符号
AMP模块 | 霍尔传感器符号(规格) | 最大电流(Im) | AMP的反馈常数(Iv) |
大型/中型 (6轴) AMP | 0 (4V/75A) | 140.62A峰值 | PM150CSD060 (150A) |
1 (4V/50A) | 93.75A峰值 | PM150CSD060 (150A) PM100CSD060 (100A) PM75CSD060 (75A) PM50CSD060 (50A) | |
2 (4V/25A) | 46.87A峰值 | ||
3 (4V/15A) | 28.12A峰值 | ||
4 (4V/10A) | 18.75A峰值 | ||
5 (4V/5A) | 9.37A峰值 |
| 注意: 由于驱动装置随机器人的不同而不同、所以在更换时、一定要确认其形式。 |

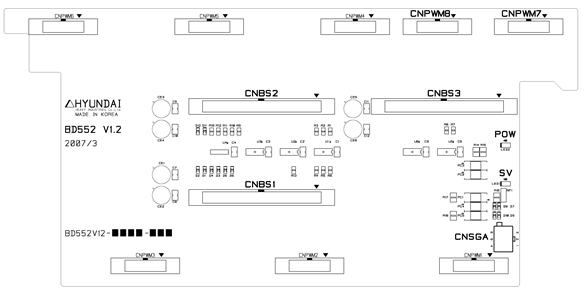
图4.49 BD552零件配置图
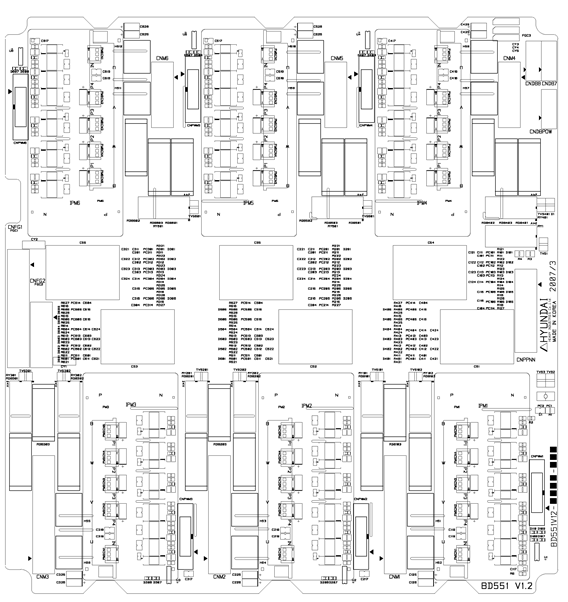
图 4.50 BD551零件配置图
表 4‑39 BD552连接器说明
名称 | 用途 | 连接外部设备 |
CNBS1、2、3 | PWM信号、错误信号 | 伺服板(BD541、BD542) CNBS1、2、3 |
CNSGA | /PWMON、SVERR、BRAKE | 顺序电路板(BD530) CNSGA |
CNPWM1~6 | PWM信号、错误信号 | 伺服放大器内BD551 CNPWM1~6 |
CNPWM7~8 | 附加轴用PWM信号、错误信号 | 可选电路板(BD554、BD556)CNPWM |
表4‑40 BD551连接器说明
名称 | 用途 | 连接外部设备 |
CNDBPOW | DB控制用电源 | BD5C0的CNPB |
CNDB7、8 | 附加轴用DB驱动信号 | 可选电路板(BD554、BD555)CNDB |
CNM1~6 | 连接马达 | CMC1、CMC2 |
CNPWM1~6 | PWM信号、错误信号 | 伺服放大器内BD552 CNPWM1~6 |
CNPPNN | 马达驱动用电源 | 驱动电源(BD561)CNPN1 |
CNFG1 | 足轴马达的机架接地 | CMC1 |
CNFG2 | 腕关节马达的机架接地 | CMC2 |
表4‑41 BD552 LED说明
名称 | 颜色 | 状态显示 |
SV | 黄色 | PWM ON时亮起 |
POW | 绿色 | 发生电压不足时熄灭 |