4.3.5.3. SA3A3D(小型6-型轴整合型驱动装置)
4.3.5.3. SA3A3D(小型6-型轴整合型驱动装置)
驱动装置(Drive Unit)是根据伺服板发出的电流指令、执行向马达各相输送电流的功率放大功能。6轴一体型驱动装置(Drive Unit)可以同时驱动6个马达、其构成如下。
小型的二极管模块转换器同小型的子放大器整合到一起、通过二极管模块的整流可以将电子场模块提供的三相电流转换成直流电、以便于将其存入平滑电容器。当机器人的速度降低时、电机产生的能量将由晶体管和电阻消耗掉。二极管模块转化器的构造如下所示。
表4‑49 SA3A3D的构造(小型6号轴整合型驱动装置)
构成元件 | 功能 | |
BD553 (IPM板) | 门驱动模块 | 生成IPM门信号 |
门电源模块 | 生成门电源 | |
电流检测部分 | 检测出马达上流过的电流 | |
BD563 (转换器板) | 整流部分 | 生成从交流电流主电源供给马达的DC电源电路 |
再生控制 | PN电源上升时、驱动IGBT | |
错误检测部分 | 过电压、再生阻抗过热、检测电涌输入错误 | |
其它零件 | Heat Sink | 把从IPM产生的热量散发到外部 |
晶体管 | 平滑直流电源 | |
再生IGBT | 进行再生控制 | |
IPM | 交换设备 | |
| 注意: 由于驱动装置随机器人的不同而不同、所以在更换时、一定要确认其形式。 |

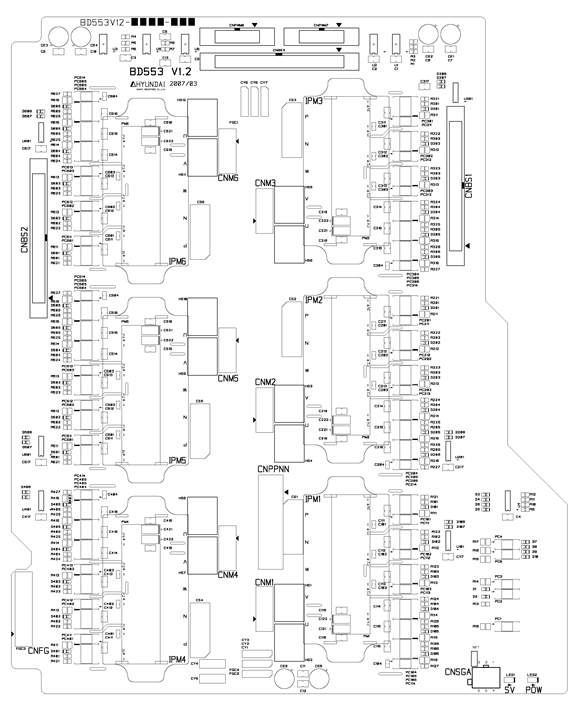
图4.52 BD553零件配置图
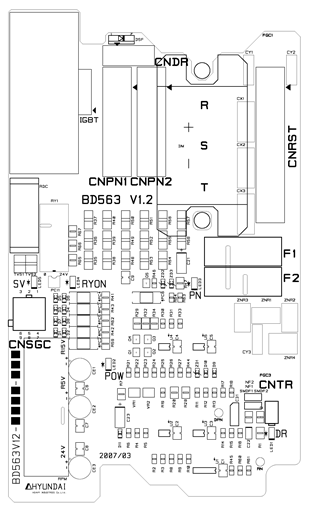
图 4.53 BD563零件配置图
表 4‑50 连接器BD553说明
名称 | 用途 | 连接外部设备 |
CNBS1、2、3 | PWM信号、错误信号 | 伺服板(BD542) CNBS1、2、3 |
CNSGA | /PWMON、 SVERR、 BRAKE | 顺序电路板(BD530) CNSGA |
CNPWM7~8 | 附加轴用PWM信号、错误信号 | 可选电路板(BD554、 BD556) CNPWM |
CNM1~6 | 连接马达 | CMC1 |
CNPPNN | 马达驱动用电源 | 驱动电源(BD561) CNPN1 |
CNFG | 足轴马达的机架接地 | CMC1 |
表4‑51 BD553 LED说明
名称 | 颜色 | 状态显示 |
SV | 黄色 | PWM ON时亮起 |
POW | 绿色 | 发生电压不足时熄灭 |
表4‑52 连接器BD563说明
名称 | 用途 | 连接外部设备 |
CNRST | 输入3相电源 | 供电模块CNRST |
CNSGC | /PWMON、OV、FLT、FB | 顺序电路板(BD530) CNSGC |
CNDR | 再生电源输出 | 再生阻抗 |
CNTR | 检测再生阻抗过热 | 再生阻抗温度传感器 |
CNPN1、2 | PN电源供给用 | 6轴伺服放大器CNPPNN、附加轴CNPN |
表4‑53 BD563 LED说明
名称 | 颜色 | 状态显示 |
SV | 黄色 | PWM ON时亮起 |
POW | 绿色 | 控制电压不足时熄灭 |
DR | 红色 | 再生放电时亮起 |
PN | 红色 | PN电压达42V以上时亮起 |
RYON | 红色 | PN放电时熄灭 |