4.1.4. 关节空间
4.1.4. 关节空间
关节空间可以定义为监控关节运动的工作空间或保护空间。工作空间指关节可以自动移动但无法移开的限制空间。而保护空间则指关节无法进入和移动的限制空间。
关节空间最多可配置 4 个空间,各空间最多有 8 个轴。各空间在配置时应含有停止距离。可以通过参数设置或安全 I/O 启用各空间。

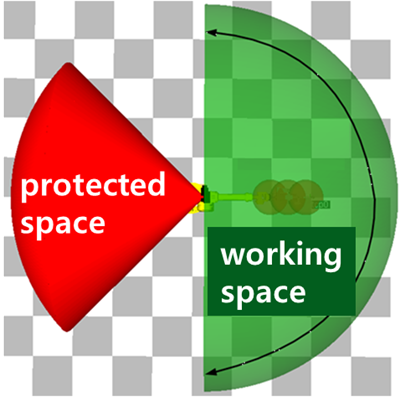
图 4.4 关节空间
在关节空间中配置的 TCP 速度也受到监控。如果 TCP 速度超过启用空间的速度限值,就会触发 STO。
当关节越过笛卡尔空间时,机器人会根据弹回时停止的配置做出反应。如果开启弹回时停止,就会触发 STO,然后机器人停止。否则,机器人不会停止,但会向安全 PLC 发出警报。
表 4‑4 关节空间参数
关节空间参数:4 个空间 | ||
参数名称 | 数值 | 说明 |
名称 | 名称字符串 | 最多 24 个字符 默认设置=“关节空间 n” ※ 仅用于 HRSafeSpace。名称未从机器人控制器传输至 SafeSpace。 |
类型 | 0,1 | 0=工作空间(默认) 1=保护空间 |
启用 | 0~2 | 0=始终关闭(默认) 1=始终开启 2=安全 IO 3=安全现场总线 |
最大 TCP 速度 | 1~30,000 (mm/s) | 笛卡尔 TCP 速度限制 默认设置:30,000 |
TCP 速度监控 | 0,1 | 监控工具处于以下位置时的 TCP 速度 0=空间内 1=空间外 |
弹回时停止 | 0,1 | 0=不停止 1=停止(默认) |
属性:关节 1~8 | ||
监控开/关 | 开/关 | 启用监控 关=不监控此关节(默认) 开=监控此关节 |
最小值 | -360~360(°) 或 -30,000~ 30,000(mm) | 关节空间下界 默认设置:-360 |
最大值 | -360~360(°) 或 -30,000~ 30,000(mm) | 关节空间上界 默认设置:360 |
关节空间范围应视为机器人控制器设置的“软限制”。如果工作空间范围大于软限制,当关节位置超过软限制范围时,可以将机器人停在工作空间内。